8 (800) 550-65-43
(звонок по России бесплатный)
+7(812) 408-81-75
(звонок по России бесплатный)
+7(812) 408-81-75
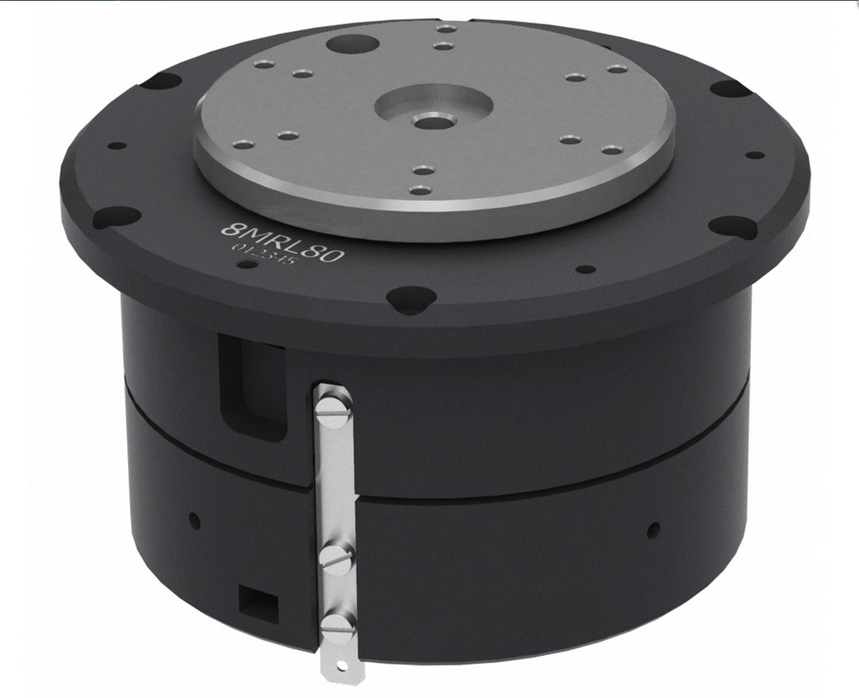
Компактная поворотная платформа с прямым приводом
8MRL80, 8MRLP80 Компактная поворотная платформа с прямым приводом
Цена доступна по запросу на sales@vicon-se.ru
Описание
Технология двигателей с прямым приводом позволяет достичь перемещения с высокой точностью позиционирования, двусторонней повторяемостью, стабильностью и низким коэффициентом трения. Поворотные платформы 8MRL80 имеют чистую апертуру 5 мм, а 8MRLP80 имеют специальный пневматический держатель, предназначенный для цанги ER11. При диапазоне поддерживаемых диаметров от 0,2 до 7 мм, 8MRLP80 идеально подходит для высокоточной лазерной обработки, такой как: лазерная резка, разметка, маркировка и т. д.
Бесконтактный оптический энкодер в качестве системы обратной связи гарантирует прямое управление положением с нанорадиальным разрешением. Естественно состаренный алюминиевый сплав гарантирует высокую температурную стабильность, легкий вес платформы и отличную длительную кинематику без изменения ее характеристик. Компактный перекрёстный роликовый подшипник обеспечивает идеальное сопротивление нагрузке в вертикальном направлении. 8MRL80 может быть подготовлена для чистых помещений и вакуума до 10-3 торр без значительных изменений конструкции.
Точность платформы проверяется в условиях, близких к реальным рабочим, Standa собирает отчёты об измерениях как в разобранном, так и в собранном виде (тестируется как система). Платформы могут быть собраны в конфигурацию карданного типа с выдающейся характеристикой пересечения осей. Управление движением 8MRL80 доступно с контроллерами и драйверами Standa или ACS.
Характеристики
|
Модель |
8MRL80-6 |
|
Диапазон вращения, градусы |
360 |
|
Тип энкодера |
оптический |
|
Модель энкодера |
LEN3 |
|
Разрешение1, градусы |
0,0000625 |
|
Интерфейс энкодера |
Дифференционный, RS422 |
|
Внутренняя интерполяция |
есть (возможна аналоговая синусно-косинусная) |
|
Степень интерполяции |
200 |
|
Период энкодера, градусы |
0,05 |
|
Точка отсчета (нуля) |
Да |
|
Абсолютная точность2 |
|
|
до калибровки, мкрад / угловых секунд |
±218 / ±45,00 |
|
после калибровки, мкрад / угловых секунд |
По запросу |
|
Односторонняя повторяемость, мкрад / угловых секунд |
N/A |
|
Двусторонняя повторяемость (пиковое значение) 2, мкрад / угловых секунд |
±7,30 / ±1,50 |
|
Двусторонняя повторяемость (среднеквадратичное отклонение) 2, мкрад / угловых секунд |
±2,90 / ±0,60 |
|
Эксцентриситет 3, мкм |
±10,00 |
|
Максимальная скорость (без нагрузки)4, град./с |
<6200 |
|
Максимальное ускорение (без нагрузки) 5, град./с2 / |
108000 / 18 |
|
Максимальный крутящий момент (непрерывный) 5, Нм |
<0.27 |
|
Максимальный крутящий момент (пиковый)5, Нм |
<0.39 |
|
Концевые выключатели |
N/A |
|
Тип двигателя |
прямой привод, моментный двигатель |
|
Модель линейного привода |
TM 65.17N |
|
Максимальное напряжение питания, В, постоянное напряжение |
>600 |
|
Максимальная нагрузка 6 |
|
|
Горизонтальная, кг |
15 |
|
Вертикальная, кг |
8 |
|
Перемещаемая масса 7, кг |
По запросу |
|
Направляющие |
Подшипник с перекрестными роликами |
|
Корпус |
алюминиевый сплав |
|
Покрытие |
черное анодированное |
|
Давление |
нормальное атмосферное |
|
Температура, °C |
+5…+30 |
|
Рекомендуемые драйверы и контроллеры 8 |
|
|
Рекомендуемые блоки питания 9 |
2/3 фазные |
|
Интерфейс управления 11 |
EtherCAT / RS232 / USB / TCP-IP |
|
Длина кабеля, м |
0,2 (другие по запросу) |
|
Дифференциальные выходы10 |
По запросу |
|
Сборка Ox, Oy |
при помощи углового кронштейна |
|
Размер подвижной платформы Ø, mm |
60 |
|
Диаметр центрального отверстия, мм |
5 |
|
Размеры (D x H), mm |
94 x 57,5(+4,5) |
Примечание
- Система может поставляться со стандартным аналоговым SIN/COS энкодером с возможностью интерполяции сигнала
- Измерения абсолютной точности и двусторонней повторяемости выполнены с помощью электронного автоколлиматора 11D-ALI-COL.
- Измерения наклона оси вращения и эксцентриситета выполнены с поощью электронного автоколлиматора 11D-ALI-COL. Разрешение 11D-ALI-COL: 1 мкрад. Основная погрешность: 1 мкрад.
- Эксцентричность измеряется интерферометром Zygo Майкельсона
- Максимальная скорость ограничена частотой энкодера и драйвера (125 кГц в аналоговом интерфейсе; 50 МГц в цифровом интерфейсе RS422); максимальная скорость также ограничена подшипником.
- Максимальное ускорение ограничено максимальным током драйвера, максимальным током двигателя и нагрузкой. Требуемые параметры можно согласовать с инженерами при расчете системы.
- Грузоподъемность ограничена положением нагрузки и системой направляющих. Требуемые параметры можно согласовать с инженерами при расчете системы.
- Перемещаемая масса - это постоянный параметр, характеризующий момент инерции системы.
- Рекомендуемые контроллеры и драйверы подбираются исходя из требований к системе.
- Рекомендуемый блок питания зависит от требуемого цикла работы системы и нагрузки
- Дифференциальные выходы доступны в пассивном (буферизованном) или активном (модулированном) способе с LCMv 2.
- Скалярное управление может выполняться через USB/ TCP-IP / RS-232 интерфейсы; векторное управление через EtherCAT
Чертежи
Сопутствующее оборудование

{kind=link}
{kind=link}
Спецификации и цены
| Номер модели | Примечания | Наличие |
|---|---|---|
| 8MRL80-6 | Чистая апертура 5 мм | Под заказ |
| 8MRLP80-6 | Крепление под цангу ER11 от 0.2 до 7 мм | Под заказ |
Положить в корзину:
@name
-
+
(цена за шт: @price )
Итого: @price
Цена по запросу
Отмена
Подтвердить
Оформите заказ, закажите каталог продукции и получите доступ к другим материалам