Моторизованный транслятор высокой грузоподъемности
8MTHP200 Моторизованный транслятор высокой грузоподъемности
Цена доступна по запросу на sales@vicon-se.ru
Описание
Трансляторы серии 8MTHP200 с ШВП основаны на технологии 3-фазного BLDC-двигателя.
Технология бесколлекторного двигателя позволяет выполнять перемещение с высокой точностью, повторяемостью и низким износом.
Линейный бесконтактный оптический энкодер в качестве системы обратной связи гарантирует прямой контроль положения с субнанометровым разрешением.
Алюминиевый сплав с анодированием гарантирует высокую термостойкость и отличную кинематику в течение длительного времени без смещения направляющей системы. Промышленная направляющая с ШВП обеспечивает высокую точность работы транслятора.
8MTHP200 может быть подготовлен для чистых помещений и работы с вакуумом до 10-3 торр путём незначительными изменениями. Возможность изготовления версии для более высокого вакуума обсуждается индивидуально.
Транслятор может быть подсоединён к оптическому столу 1HT/1HB напрямую.
Технология бесколлекторного двигателя позволяет выполнять перемещение с высокой точностью, повторяемостью и низким износом.
Линейный бесконтактный оптический энкодер в качестве системы обратной связи гарантирует прямой контроль положения с субнанометровым разрешением.
Алюминиевый сплав с анодированием гарантирует высокую термостойкость и отличную кинематику в течение длительного времени без смещения направляющей системы. Промышленная направляющая с ШВП обеспечивает высокую точность работы транслятора.
8MTHP200 может быть подготовлен для чистых помещений и работы с вакуумом до 10-3 торр путём незначительными изменениями. Возможность изготовления версии для более высокого вакуума обсуждается индивидуально.
Транслятор может быть подсоединён к оптическому столу 1HT/1HB напрямую.
Два транслятора могут собираться в XY-конфигурацию напрямую, без использования соединительных пластин.
Управление возможно с помощью контроллеров Standa 8SMC5 или ACS.
Для промышленного применения ступени 8MTHP200 могут поставляться установленными на стандартном оптическом столе или гранитной плите.
Привод полностью защищен от брызг и пыли.
Управление возможно с помощью контроллеров Standa 8SMC5 или ACS.
Для промышленного применения ступени 8MTHP200 могут поставляться установленными на стандартном оптическом столе или гранитной плите.
Привод полностью защищен от брызг и пыли.
Транслятор идеально подходит для перемещения нагрузки до 50 кг в вертикальном направлении.
Пожалуйста, при заказе данного транслятора указывайте необходимую вам комплектацию: наличие управления и питания, основания и т.д.
Характеристики
| Модель | 8MTHP200-100 -B60-LEN1 |
8MTHP200-200 -B60-LEN1 |
8MTHP200-300 -B60-LEN1 |
| Диапазон перемещения, мм | 100 | 200 | 300 |
| Тип поворотного энкодера | Оптический | ||
| Модель поворотного энкодера | MEN5 | ||
| Разрешение поворотного энкодера, нм | 250 | ||
| Интерфейс поворотного энкодера | RS422 | ||
| Период решётки поворотного энкодера, CPR/PPR | 2500/10000 | ||
| Реперная точка (индекс) | Есть | ||
| Тип линейного энкодера | Оптический | ||
| Модель линейного энкодера | LEN1 | ||
| Разрешение линейного энкодера, нм | <0.31 | ||
| Интерфейс линейного энкодера | RS422 или 1Vpp | ||
| Встроенная интерполяция | доступна (до х65536) | ||
| Период решётки линейного энкодера, мкм | 20 | ||
| Реперная точка (индекс) | Есть | ||
| Абсолютная точность 2) | |||
| до калибровки, мкм | ±4 | ±8 | ±10 |
| после калибровки, мкм | ±1 | ||
| Двунаправленная повторяемость (от края до края) 2), мкм | ±0.5 | ||
| Тангаж 3), мкрад/уг.сек | ±15 / 3.1 | ±20 / 4.13 | ±25 / 5.16 |
| Рысканье 3), мкрад/уг.сек | ±15 / 3.1 | ±20 / 4.13 | ±25 / 5.16 |
| Крен, мкрад/уг.сек | ±15 / 3.1 | ±20 / 4.13 | ±25 / 5.16 |
| Макс. скорость (нагрузка 4 кг) 4), мм/сек | 200 | ||
| Макс. ускорение (нагрузка 4 кг) 5), мм/сек2 | 1000 | ||
| Тип концевиков | Оптронные | ||
| Полярность концевиков | замкнуты при срабатывании | ||
| Напряжение на концевиках, В | 24 | ||
| Тип двигателя | BLDC-двигатель на ШВП (шаг резьбы 2.5 мм) | ||
| Модель двигателя | B60 | ||
| Питание, В | 48 | ||
| Максимальная нагрузка (центральное расположение) 6) | |||
| Горизонтальная, кг | 100 | ||
| Вертикальная, кг | 50 | ||
| Перемещаемая масса 7), кг | 9.5 | ||
| Материал | алюминиевый сплав | ||
| Финишное покрытие | чёрное анодирование | ||
| Рабочее давление | нормальное атмосферное | ||
| Рабочая температура, °C | 20±2 | ||
| Рекомендуемые контроллеры и драйверы | контроллеры ACS или 8SMC5-USB | ||
| Рекомендуемые блоки питания 9) | однофазные и трёхфазные | ||
| Интерфейсы управления 12) | EtherCAT/RS232/USB/TCP-IP | ||
| Длина кабеля, м | 2 (другие длины по запросу) | ||
| Дифференциальные выходы 10) | по запросу | ||
| Основание для крепления на оптический стол |
Не требуется |
||
| Сборка XY | Напрямую | ||
| Вертикальная ориентация Z | Есть | ||
| Магнитный тормоз | Есть | ||
| Размеры подвижной площадки, мм | 206x206 | ||
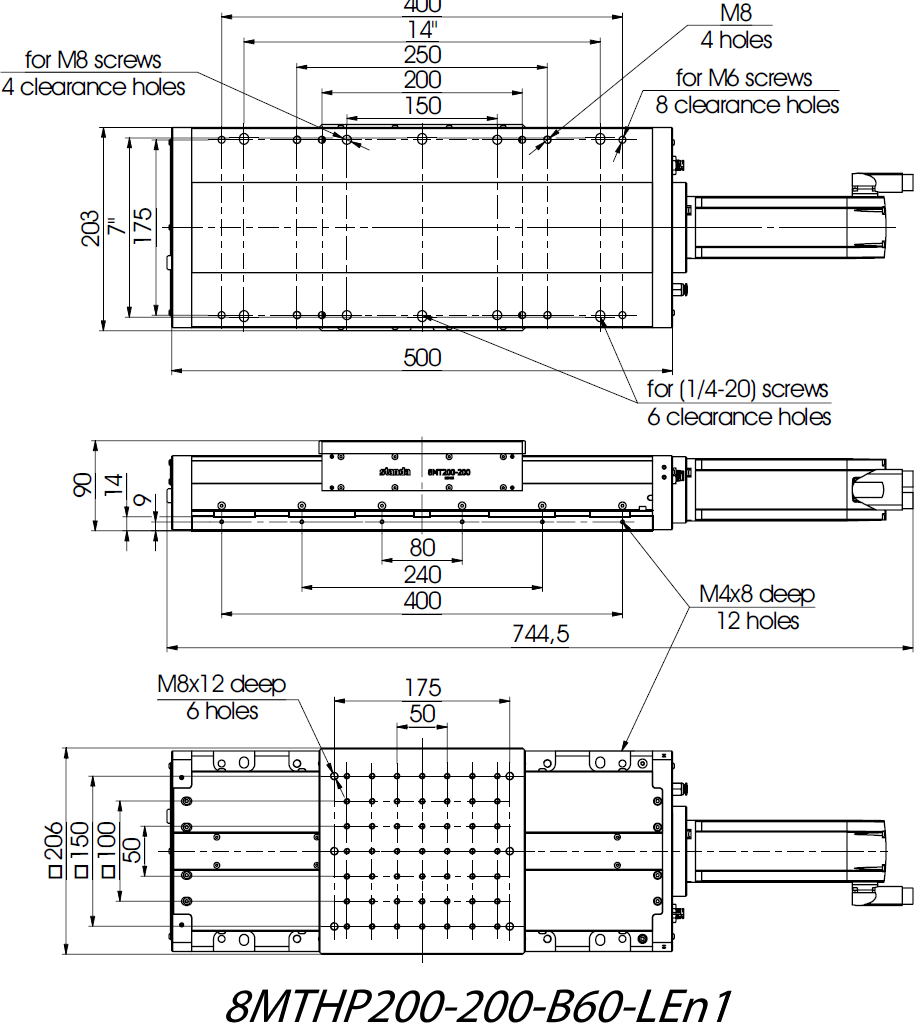
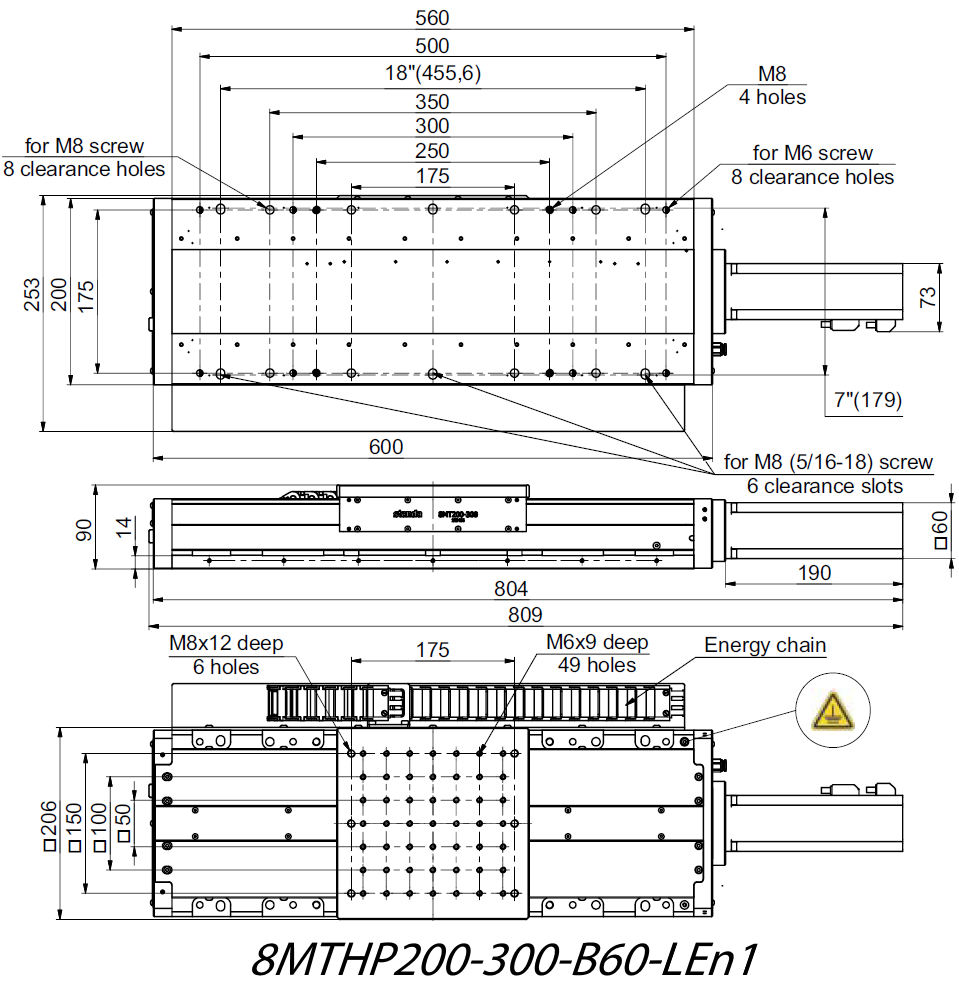
| Габариты транслятора (ДхШхВ), мм | 644.5×206×90 | 744.5×206×90 | 844.5×206×90 |
| Система измерения | метрическая | ||
| Ортогональность осей при сборке XY 11), мкрад/уг.сек | нет данных | ||
| Уровень защиты | от пыли и брызг | ||
| Соответствие RoHS | соответствует | ||
| Вес, кг | 25 | 27 | 29 |
|
1) CPR - период энкодера или количество импульсов на оборот; для стандартной квадратуры x4 PPR - количество импульсов на оборот.
2) Абсолютная точность и двусторонняя повторяемость измерены с помощью лазерного интерферометра Майхельсона Zygo ZMI 501.
3) Величины углов тангажа и рыскания выполнены с помощью электронного автоколлиматора 11D-ALI-COL с разрешением 1 мкрад. Основная погрешность: 1 мкрад.
4) Максимальная скорость ограничена частотой энкодера и драйвера; максимальная скорость также ограничена параметрами направляющих
5) Максимальное ускорение ограничено максимальным током драйвера, максимальным током двигателя и внешней нагрузкой. Требуемые параметры можно согласовать с инженерами при расчете системы.
6) Грузоподъемность ограничена положением нагрузки и системой направляющих. Требуемые параметры можно согласовать с инженерами при расчете системы.
7) Перемещаемая масса - это постоянный параметр, характеризующий момент инерции системы.
8) Рекомендуемые контроллеры и драйверы подбираются, исходя из требований к системе.
9) Рекомендуемый блок питания зависит от требуемого цикла работы системы и нагрузки
10) Дифференционные выходы доступны в пассивном (буфферизация) или активном (модуляция) режимах LCMv2.
11) Платформы могут быть собраны с требуемой ортогональностью поверхностей
12) Скалярное управление может выпоняться через USB/ TCP-IP / RS-232 интерфейсы; векторное управление через EtherCAT
13) В конструкцию позиционеров входит пыле- и влагозащита, позволяющая использовать их в пыльных и частично влажных помещениях
|
Чертежи
Сопутствующее оборудование




{kind=link}
{kind=link}
Спецификации и цены
| Номер модели | Перемещение | Наличие |
|---|---|---|
| 8MTHP200-200-B60-LEn1 | 200 мм | Под заказ |
| 8MTHP200-300-B60-LEn1 | 300 мм | Под заказ |
| 8MTHP200-100-B60-LEn1 | 100 мм | Под заказ |
Положить в корзину:
@name
-
+
(цена за шт: @price )
Итого: @price
Цена по запросу
Отмена
Подтвердить
Оформите заказ, закажите каталог продукции и получите доступ к другим материалам