8 (800) 550-65-43
(звонок по России бесплатный)
+7(812) 408-81-75
(звонок по России бесплатный)
+7(812) 408-81-75
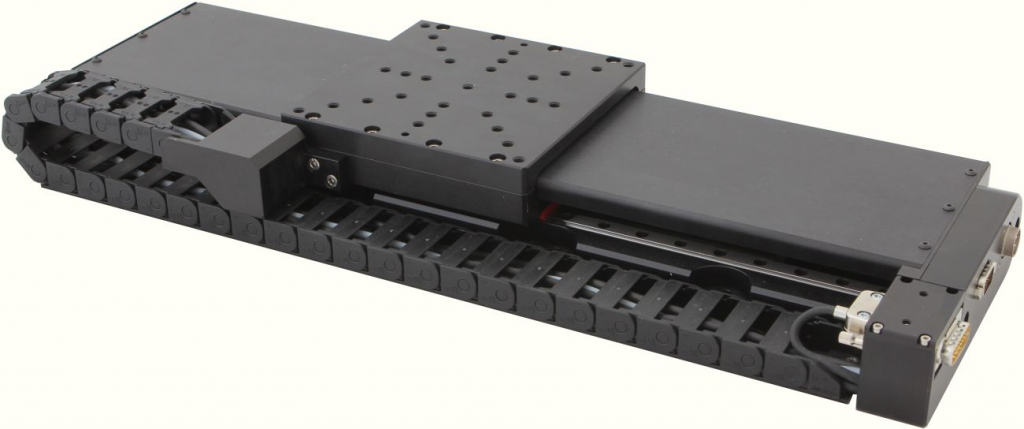
Моторизованный линейный транслятор с прямым приводом
8MTL1401-300 Моторизованный линейный транслятор с прямым приводом
Цена доступна по запросу на sales@vicon-se.ru
Описание
В моторизированной платформе серии 8MTL используется трехфазный бесщеточный линейный сервопривод без сердечника. Прямой привод обеспечивает движение с нулевым люфтом и позволяет добиться высокой точности, повторяемости и низкого коэффициента трения.
Линейный оптический энкодер в качестве системы обратной связи обеспечивает управление перемещением с субмикрометровым разрешением движения.
Естественно состаренный алюминиевый сплав гарантирует устойчивость к высоким температурам, легкость конструкции 8MTL и долгий период работы без износа направляющих.
Линейные трансляторы серии 8MTL могут быть подготовлены для работы в чистых помещениях и вакууме до 10^-3 Торр. Дополнительные требования к чистоте согласовываются по запросу.
Моторизированные линейные трансляторы могут быть с легкостью закреплены на оптическом столе с помощью винтов 3STS. Трансляторы стыкуются в систему для перемещения по двум горизонтальным осям (XY) без использования дополнительных соединительных пластин. Возможно изготовление вертикального транслятора для перемещения по оси Z.
Управление движением 8MTL осуществляется с помощью контроллеров Standa.
Скорость и ускорение протестированы с использованием PS36-4.4-4 с напряжением постоянного тока 36 В и током 3.1 А.
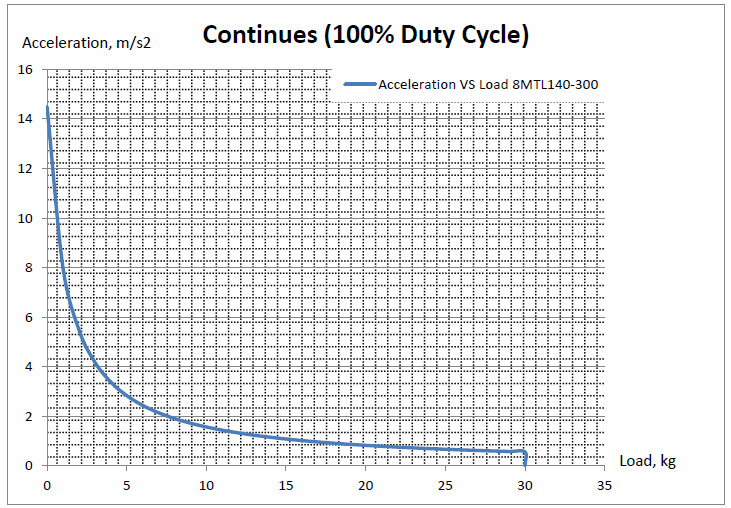
Максимальная нагрузка может быть ограничена требованиями к ускорению, а также к качеству направляющих.
Разрешение и тип оптического энкодера могут быть изменены.
Характеристики
| Управление перемещением | |
| Диапазон перемещения | 300 мм |
| Тип энкодера | бесконтактный оптический энкодер |
| Модель энкодера | LEn1 |
| Разрешение энкодера1 | от 5 мкм до 25 нм (по запросу) |
| Интерфейс энкодера | Дифференцильный RS422 |
| Внутрення интерполляция | есть |
| Степень интерполяции | 4-200 (по запросу) |
| Период энкодера | 20 мкм |
| Реперная точка (индекс) | есть |
| Абсолютная точность2 | |
| до калибровки | ±5 мкм |
| после калибровки | ±1 мкм |
| Односторонняя повторяемость | по запросу |
| Двусторонняя повторяемость (пиковое значение) | ±0.15 мкм или лучше |
| Двустороння повторяемость (среднеквадратичное отклонение)2 | ±0.08 мкм |
| Допуск на угол тангажа3 | ±30 мкрад/±6.2 угловые секунды |
| Допуск на угол рыскания3 | ±30 мкрад/±6.2 угловые секунды |
| Допуск на угол крена | N/A |
| Максимальная скорость (с нагрузкой 4 кг)4 | <2 000 мм/с |
| Максимальное ускорение (с нагрузкой 4 кг)5 | <20 000 мм/с2 |
| Тип концевых датчиков | Оптические (оптронные) |
| Полярность концевых датчиков | Замкнут при срабатывании |
| Напряжение питания концевых датчиков | 5…24 В |
| Нагрузка, направляющие, передача | |
| Тип | Позиционер с линейным двигателем |
| Двигатель | LM3 |
| Тип двигателя | бесщеточный линейный сервопривод |
| Максимальное напряжение питания | >300 В (постоянное) |
| Грузоподъемность (при размещении по центру платформы)6 | 30 кг |
| Перемещаемая масса7 | 1.2 кг |
| Направляющие | линейные рециркулирующие шариковые |
| Материалы и условия эксплуатации | |
| Материал корпуса | алюминиевый сплав |
| Покрытие корпуса | черное анодированное |
| Давление окружающей среды | нормальное атмосферное |
| Рабочая температура | 20±2 °C |
| Управление, кабели, интерфейсы | |
| Рекомендуемые контроллеры8 | ACS, 8SMC5-USB |
| Рекомендуемые драйверы8 | ACS, 8SMC5-USB |
| Рекомендуемый блок питания9 | 2х или 3х фазное питание |
| Интерфейсы подключения12 | EtherCAT / RS232 / USB / TCP-IP |
| Длина кабеля | 2 м (по запросу комплектуетмя кабелем другой длины) |
| Дифференциальный выходы10 | по запросу |
| Дополнительные приспособления | |
| Основание | не требуется |
| Сборка XY | без дополнительных пластин |
| Сборка Z | не осуществляется для данной модели |
| Дополнительная информация | |
| Размер подвижной платформы | 140х140 мм (ДхШ) |
| Линейные размеры позиционера | 185х513х55 мм (ШхДхВ) |
| Стандарт размеров | возможно метрическое и неметрическое исполнение |
| Ортогональность осей в XY сборке11 | 24 мкрад / 5 угловых секунд |
| Степень защиты13 | базовый |
| RoHS | совместима |
| Масса | 6.75 кг |
1) С квадратурой x4; система может поставляться со стандартным аналоговым SIN/COS энкодером, с возможностью интерполяции сигнала
2) Абсолютная точность и двусторонняя повторяемость измерены с помощью лазерного интерферометра Майхельсона Zygo ZMI 501.
3) Величины углов тангажа и рыскания выполнены с помощью электронного автоколлиматора 11D-ALI-COL с разрешением 1 мкрад. Основная погрешность: 1 мкрад.
4) Максимальная скорость электрически ограничена частотой энкодера и драйвера; максимальная скорость также ограничена параметрами направляющих
5) Максимальное ускорение ограничено максимальным током драйвера, максимальным током двигателя и внешней нагрузкой. Требуемые параметры можно согласовать с инженерами при расчете системы.
6) Грузоподъемность ограничена положением нагрузки и системой направляющих. Требуемые параметры можно согласовать с инженерами при расчете системы.
7) Перемещаемая масса - это постоянный параметр, характеризующий момент инерции системы.
8) Рекомендуемые контроллеры и драйверы подбираются исходя из требований к системе.
9) Рекомендуемый блок питания зависит от требуемого цикла работы системы и нагрузки
10) Дифференционые выходы доступны в пассивном (буфферизация) или активном (модуляция) режимах LCMv2.
11) Платформы могут быть собраны с требуемой ортогональностью поверхностей
12) Скалярное управление может выпоняться через USB/ TCP-IP / RS-232 интерфейсы; веркторное упралвение через EtherCAT
13) Защита направляющих в конструкции позиционера не предусмотрена. Модель не предназначена для использования их в пыльных и влажных помещениях
Чертежи
{kind=link}
Спецификации и цены
| Номер модели | Разрешение, мкм | Интерполяция | Наличие |
|---|---|---|---|
| 8MTL1401-300-LEn1 | 5 | аналоговый сигнал | Под заказ |
| 8MTL1401-300-LEn1-005 | 1 | х5 | Под заказ |
| 8MTL1401-300-LEn1-010 | 0.5 | х10 | Под заказ |
| 8MTL1401-300-LEn1-025 | 0.2 | х25 | Под заказ |
| 8MTL1401-300-LEn1-050 | 0.1 | х50 | Под заказ |
Положить в корзину:
@name
-
+
(цена за шт: @price )
Итого: @price
Цена по запросу
Отмена
Подтвердить
Оформите заказ, закажите каталог продукции и получите доступ к другим материалам